2025/07/26
- 今回はSUBARUのPHEVを扱いますが、PHEVの前に準備としてプラネタリーギアの速度線図について説明します。理由ですが、PHEVは内部で2個のプラネタリーギアを使っているからです。
- 以前重ね合わせの理を使ってプラネタリーギア回転数の考え方を表にまとめました。これらを組み合わせればプラネタリーギアの回転数を計算することができます。$r_{r}$ がリングギア歯数、$r_{s}$ がサンギア歯数です。
- Table 1を見るとキャリアの回転数は、リングギアとサンギアの歯数で決まる係数に比例することがわかります。これを図にしたのがFigure 1の左側です。サンギア固定が青線、リングギア固定が橙線です。
- これを見ると、仮に横軸を$r$として、$r=0$:サンギア、$r=r_{r}+r_{s}$:リングギアとすれば、$r=r_{r}$:キャリアになることがわかります。
- サンギア回転数$=N_{s}$ 、リングギア回転数$=N_{r}$ の時、キャリア回転数$N_{c}$ は、重ね合わせの理から下記になります。 \[N_{c}=N_{r}\frac{r_{r}}{r_{r}+r_{s}}+N_{s}\frac{r_{s}}{r_{r}+r_{s}}\]
- 上記は青線と橙線の重ね合わせなことから、Figure 1の右側...緑線に相当することは自明(*1)です。つまり、図中でサンギア/キャリア/リングギアの内2点を直線で結べば、残りのギア回転数がわかります。これが速度線図です。
Table 1: プラネタリーギアの回転数要素
| 回転ケース | リングギア固定 | サンギア固定 |
| サンギア回転数($N_{s}$) | $N_{s}$ | $0$ |
| リングギア回転数($N_{r}$) | $0$ | $N_{r}$ |
| キャリア回転数($N_{c}$) | $\displaystyle N_{s}\left(\frac{r_{s}}{r_{r}+r_{s}}\right)$ | $\displaystyle N_{r}\left(\frac{r_{r}}{r_{r}+r_{s}}\right)$ |
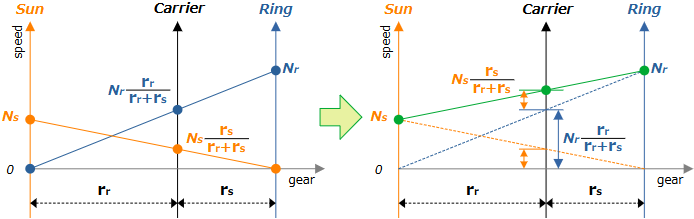
Figure 1: プラネタリーギアの速度線図
PHEVの構造
- プラネタリーギアの回転は速度線図上で直線を引けば良いことを「直感と結びつけた」ところで、次はPHEVのトランスミッションを見ることにします。
- 入出力の組み合わせが見やすくなるよう図にしてみました。2個のモータと、2個のプラネタリーギアを組み合わせているのがわかると思います。
- 正直TOYOTAのTHS IIはあまり見ていなかったので、SUBARUのPHEVとして初めてこの仕組みを見た時は
- あれ? トルコンは?
- 変速は...どうやってやるの?
- リアシャフトのカップリングクラッチは、SUBARU AWDの全てについているものですが、それ以外にクラッチが無いという構造はすごいもので、THSを考えた人は天才ですね。
- MG2プラネタリーギアはリングが固定されてるので、事実上普通のリダクションギアです。SUBARU PHEV開発として、まずはTHS IIの要素を縦置きで入れ込む検証をしていたのではと推測しています。
 クリックで拡大
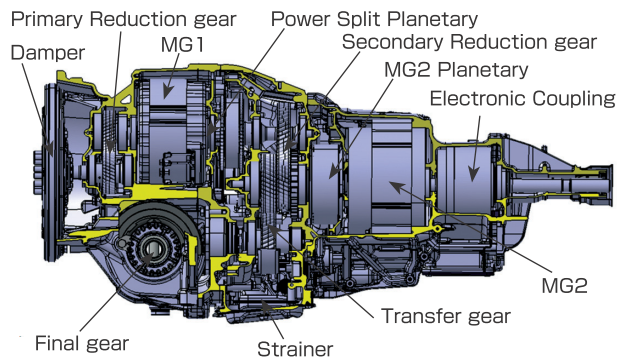
クリックで拡大Figure 2: PHEV用トランスミッション(スバル技報2019より)
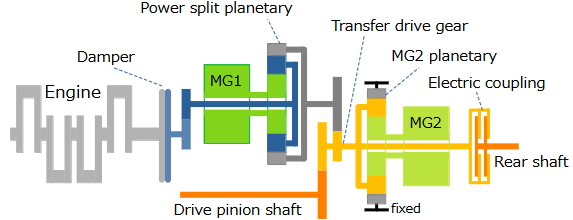
Figure 3: PHEV用トランスミッション
各走行モードでの動き
- さて、Figure 3でわかるようにドライブシャフトの回転数を決めているのはMG2です。トルクはパワースプリットプラネタリを経由するエンジントルクとMG2トルクを合わせたものになります。
- つまり回転数の制御とは、上位のコントローラがエンジンとMG2に対して所望の回転数となるように「エンジンの燃料噴射」と「MG2のインバーター制御」を行うことになります。その結果Figure 3のトランスミッションはCVTとして動作します。
- では走行モード毎に見ていきましょう。最初の停車時からエンジンスタートですが、この時だけMG1が正トルクで回転(力行)してエンジンをスタートします(a)。エンジンが回りだすと、すぐにMG1回生モードとなりバッテリーを充電します(b)。
- 次はEVモードです。SUBARUのPHEVでは、MG2のみが走行で使用されます。MG2走行時エンジンはOFFのため、MG1は逆回転ですが電流路を切って空転しています(トルクは0)。減速時はMG2も回生モードになります。
- 次はエンジンとMG2の両方を使用する通常走行モードですが、プラネタリーキャリアへの入力であるエンジンのトルクをリングギア/ドライブギアへ伝えるには、必ずMG1にも回生トルクが必要です。
- そしてモーターはドライブシャフト回転数(速度)が上がるとトルクは下がるため、速度が低い場合のトルク主体はMG2で、速度が高い場合のトルクはエンジン主体となります。
- エンジンの出力トルクを変えるには、その特性に沿ってエンジンのシリンダシャフト回転数を変更します。パワースプリットプラネタリのリングギア回転数はドライブシャフトが握っているため、エンジンの回転数を変えるには、エンジンへの燃料噴射だけではなく、MG1の回転数も協調制御することが必要です。
- そしてここでは回転数に着目した説明をしていますが、モーターの場合はトルク自身も制御できる(*2)ので、協調制御にはトルク制御も含まれることになります。
- このようにパワースプリットプラネタリで状況に応じてトルクを配分するものの、MG1/エンジン/MG2の協調制御は外部で行われます。まさに電子制御時代のトランスミッションですね。すばらしい機能ですが、機能安全の対応を考えると頭が痛くなります...。とても大変そうです...。
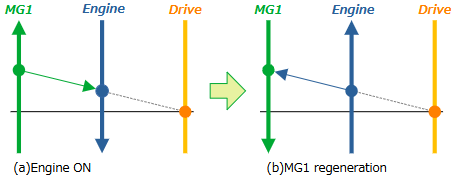
Figure 4: エンジンスタートからMG1回生モード
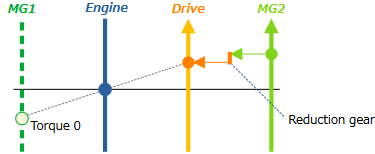
Figure 5: EVモード
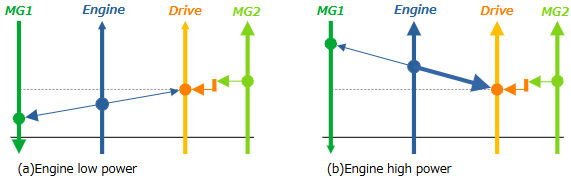
Figure 6: エンジン+MG2協調モード
次回はS:HEV
- 次回はS:HEVですが、トランスミッションの動作は、今回のPHEVとほぼ...仕組み的には完全に同じです。そのため、なぜFB25と組み合わせたのか等について、考えたことを書いてみるつもりです。
2025-07-27: 速度線図にMG2とトルク正負表現を追加、パワースプリットプラネタリの説明補足
Copyright(C) 2025 Altmo
本HPについて
本HPについて